Projects 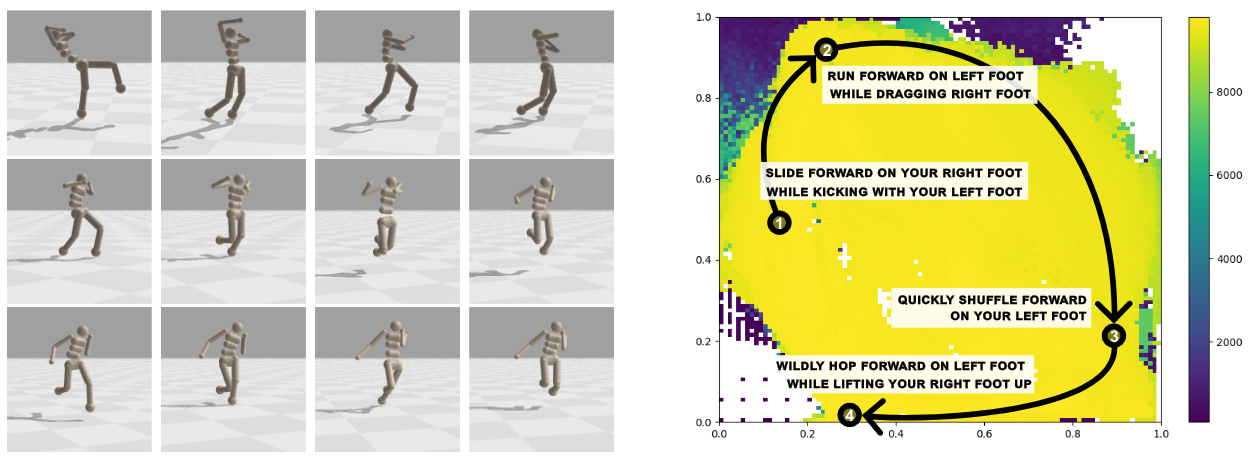
Policy Diffusion: Generative Models for Policy Datasets
We show how to train a generative model over neural network parameters (a "diffusion graph hyper-network"). The resulting model is able to take in a task description (e.g. "hop forward on your right foot"), and produces a small neural network that performs that behavior. [ArXiv URL]